Un ambiente di ricerca e sviluppo dedicato all’Industry 4.0
L’obiettivo di AgiLAB è quello di emulare in scala il processo produttivo di una Smart Factory, al fine di aiutare nella comprensione di tutta una serie di tecnologie innovative destinate al mondo industriale e in particolar modo al settore manifatturiero.
AgiLAB è un laboratorio demo dinamico per definizione, progettato per evolversi insieme ai progressi tecnologici per l’Industria.
Presentato per la prima volta al Mecspe di Parma nel marzo 2019, AgiLAB è stato costantemente aggiornato per integrare le tecnologie più avanzate, confermandosi una demo all’avanguardia per sperimentare e immaginare il futuro della produzione industriale.
Ripercorri il processo produttivo di AgiLAB in tutte le sue versioni e scopri che tecnologie sono state integrate volta per volta.
L'evoluzione di AgiLAB
2018
AgiLAB prende forma nel 2018 come risposta all’esigenza di creare una demo e uno showroom capaci di rendere tangibile il valore delle soluzioni software sviluppate da Eureka System.
Il progetto nasce dalla visione del CEO di Eureka System, Eros Contò, e il talento creativo del designer Dario Lopez.
Insieme, hanno concepito uno spazio dove tecnologia, design e funzionalità si fondono per raccontare il futuro dello Smart Manufacturing.
2019
Con l’obiettivo di emulare in scala un processo industriale completo, nella sua prima versione AgiLAB si concentrava sul settore delle Materie Plastiche.
Il processo simulava un’intera filiera produttiva dedicata alla creazione di piccoli oggetti in plastica personalizzati.
Questa dimostrazione metteva in evidenza il valore aggiunto della personalizzazione su commissione, e come ottenere questa flessibilità produttiva grazie all’automazione di processo.
2022
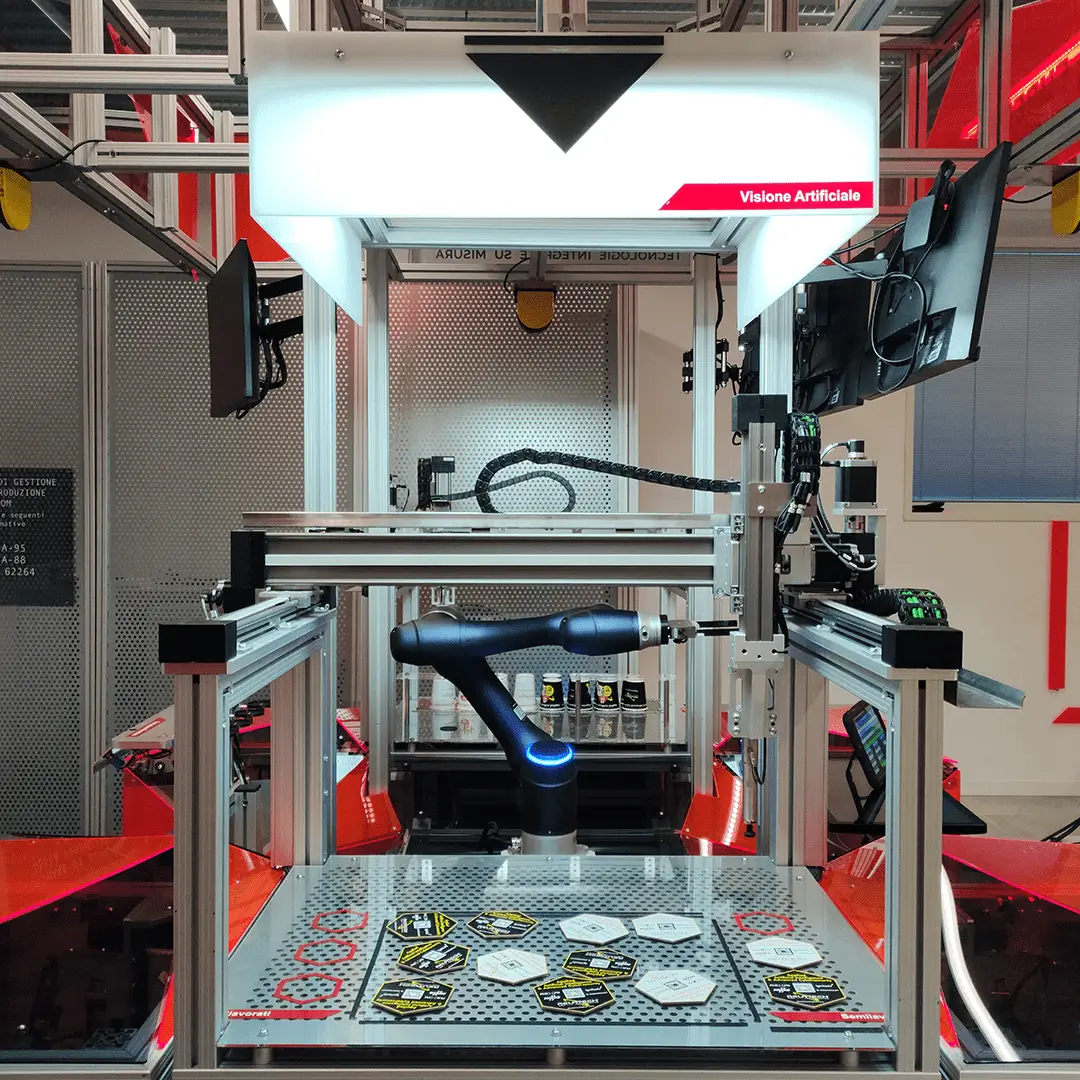
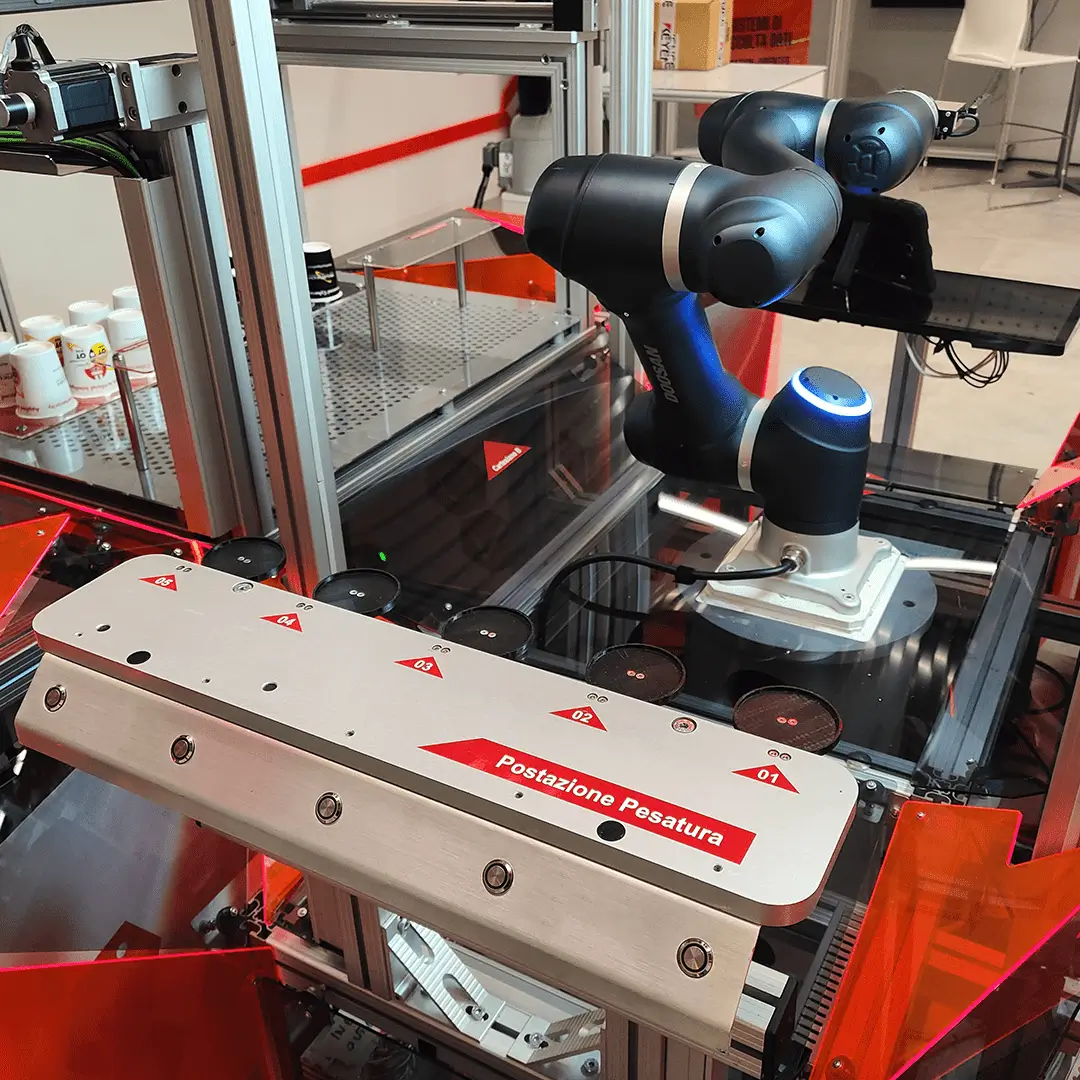
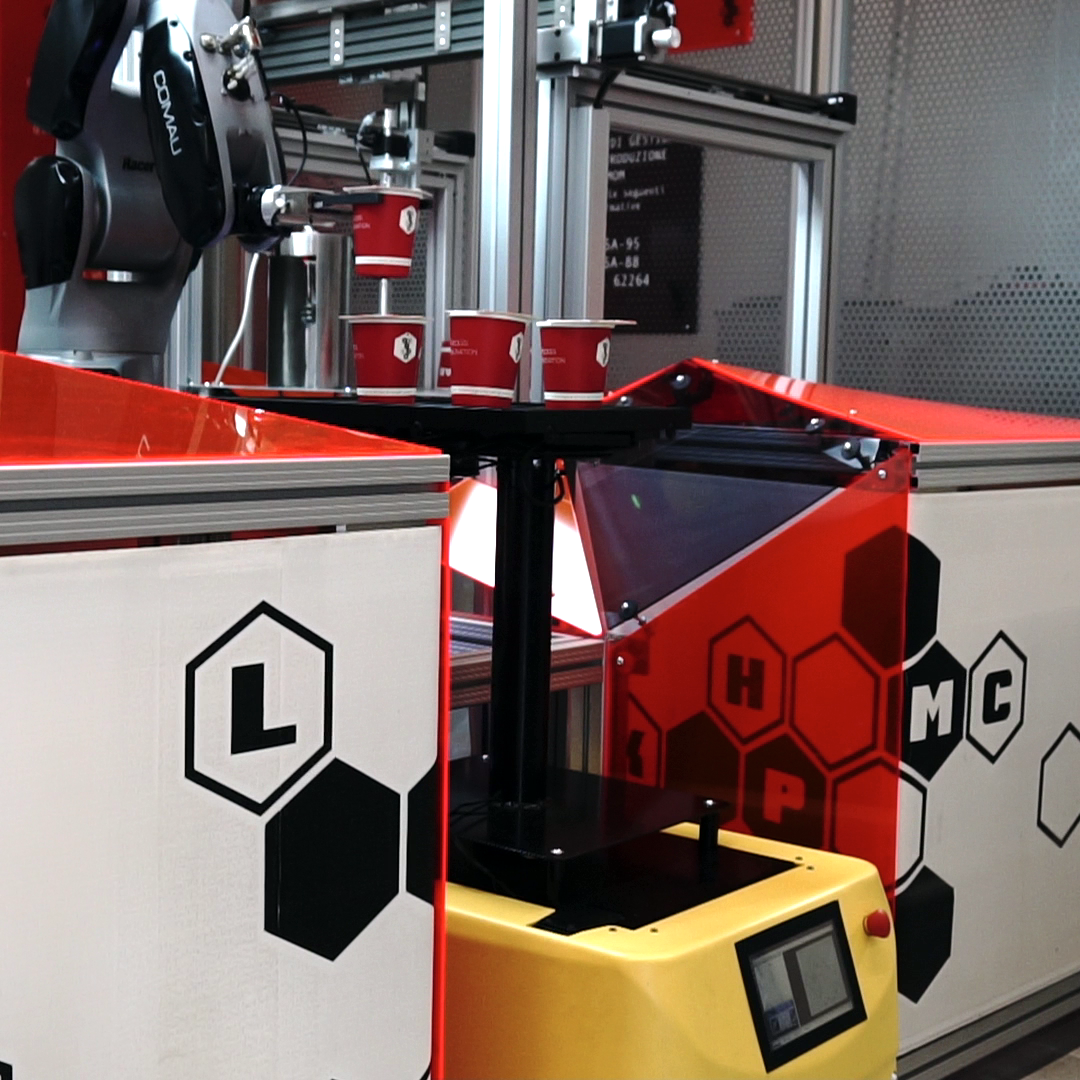
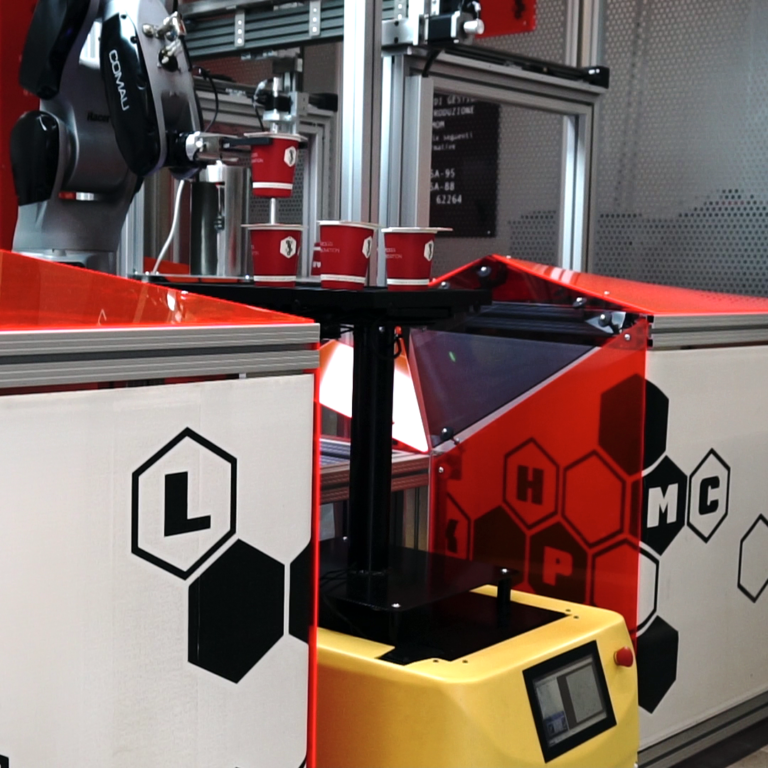
Successivamente, AgiLAB ha esteso le sue capacità al settore Beverage, offrendo una demo altamente interattiva e coinvolgente.
I visitatori potevano scoprire tecnologie avanzate dello Smart Manufacturing e ricevere una bevanda calda in un recipiente personalizzato.
Ogni fase del processo era automatizzata e interattiva: dalla scelta dell’aroma della bevanda, al proprio nome inciso su un sottobicchiere dal CAM-Robot integrato in AgiLAB, fino alla consegna finale effettuata da un robot mobile autonomo (AMR Jobot).
2024
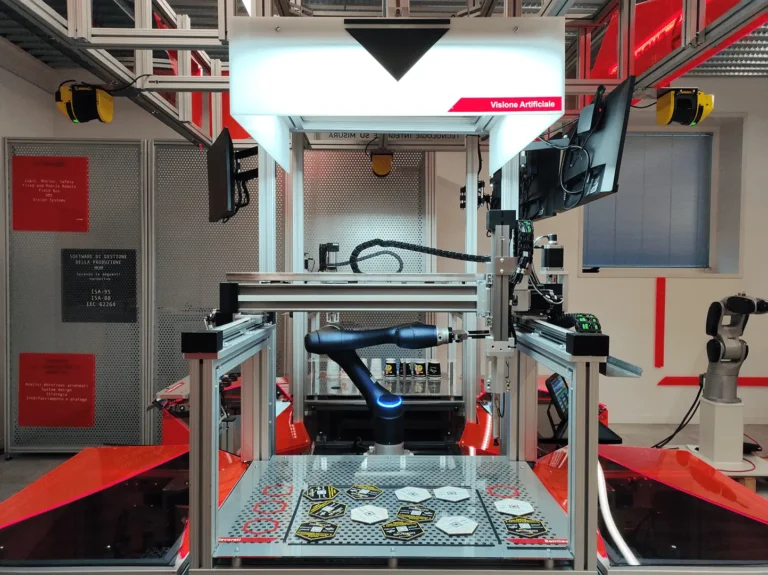
Nella sua versione più recente, AgiLAB è stato arricchito con l’Intelligenza Artificiale generativa, sviluppata in collaborazione con i partner Relatech ed EFA Automazione. Questo avanzamento tecnologico sottolinea la sinergia tra uomo e macchina, integrando automazione avanzata e operazioni manuali in un unico processo produttivo.
In questa versione AgiLAB emula un processo produttivo che distribuisce diverse varianti di uno stesso prodotto finale.
Grazie all’AI, l’esperienza del visitatore diventa ancora più immersiva: AgiLAB è ora in grado di comprendere e rispondere ai comandi vocali, offrendo un’interazione naturale e intuitiva.
Questa demo evidenzia le potenzialità della tecnologia nel migliorare la produttività e la flessibilità operativa, dimostrando come l’integrazione tra automazione e intelligenza artificiale possa ridefinire il concetto stesso di Smart Manufacturing.